Resources
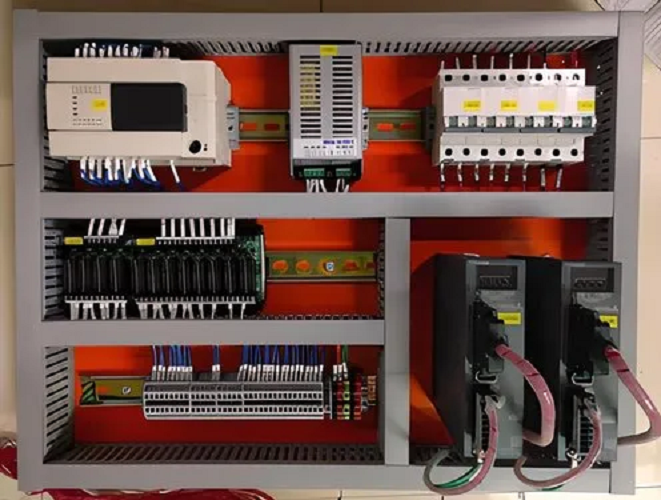
[vc_row][vc_column][vc_column_text]PLC
PLCs were first created to serve the automobile industry. The first programmable logic controller project was developed in 1968 for General Motors to replace hard-wired relay systems with electronic controllers. PLCs have remained widely used in the early 21st century within manufacturing sectors such as the automobile industry. Programmable Logic Controller (PLC) is a digital computer. A programmable controller, formally called the programmable logic controller (PLC) can be defined as a solid state device member of the computer family used for the automation of various electro-mechanical processes in industries. These controllers are specially designed to survive in harsh situations and shielded from heat, cold, dust, and moisture etc. PLC consists of a microprocessor which is programmed using the computer language.
It is capable of storing instruction to implement control functions such as sequencing, timing, counting, arithmetic, data manipulation and communication to control industrial machines and processes.[/vc_column_text][vc_column_text]SCADA
SCADA systems were initially employed in the 1960s. They include both software and hardware components. The hardware collects and enters data into a computer with SCADA software. Supervisory Control and Data Acquisition (SCADA) refers to industrial control systems (ICS) that are employed to control and keep track of equipment or a plant in industries like water and waste control, telecommunications, energy, transport, and oil and gas refining. SCADA is a computer system used to gather and analyze real-time data this data is processed by the computer and is presented on a regular basis. SCADA also saves and make logs for every event into a log file that is saved on a hard drive or is sent to a printer. SCADA gives warnings by sounding alarms if situations develop into hazardous scenarios. A communication system this is employed to move data between different pieces of field data interface equipment and control units, and the computer systems employed in the SCADA central host. The system may be telephone, radio, satellite, cable, and so on, or a combination of any of these. The communications network is designed to offer the way by which the data can be transmitted in between the field-based RTUs and the central host computer servers.[/vc_column_text][vc_column_text]HMI
An acronym for Human Machine Interface, An HMI is a software application that presents information to an operator or user about the state of a process, and to accept and implement the operators control instructions. Typically information is displayed in a graphic format (Graphical User Interface or GUI). An HMI is often a part of a SCADA (Supervisory Control and Data Acquisition) system. A human machine interface (HMI) is an interface which permits interaction between a human being and a machine. Human machine interfaces vary widely, from control panels for nuclear power plants to the screen and input buttons on a cell phone. A human machine interface (HMI) is an interface which permits interaction between a human being and a machine. Human machine interfaces vary widely, from control panels for nuclear power plants to the screen and input buttons on a cell phone. Designing such interfaces is a challenge, and requires a great deal of work to make the interface functional, accessible, pleasant to use, and logical. Some engineers specialize in developing human machine interfaces and changing the ways in which people interact with machines and systems. The technology behind the human machine interface is constantly improving. Researchers have developed interfaces which can be controlled with the mind, for example, seeing applications for this technology among stroke patients and other people with severely restricted modes of communication. Likewise, outputs have become much more sophisticated over time.[/vc_column_text][vc_column_text]VFD
A VFD stands for Variable Frequency Drive which is basically used to control the speed of the motor. A Variable Frequency Drive (VFD) is a type of motor controller that drives an electric motor by varying the frequency and voltage supplied to the electric motor. Other names for a VFD are variable speed drive, adjustable speed drive, adjustable frequency drive, AC drive, micro drive, and inverter.
Frequency (or hertz) is directly related to the motor’s speed (RPMs). In other words, the faster the frequency, the faster the RPMs go. If an application does not require an electric motor to run at full speed, the VFD can be used to ramp down the frequency and voltage to meet the requirements of the electric motor’s load. As the application’s motor speed requirements change, the VFD can simply turn up or down the motor speed to meet the speed requirement.
[/vc_column_text][vc_column_text]DCS
DCS stands for Distributed Control System. It is a type of automated control system that is distributed throughout a machine to provide instructions to different parts of the machine. Instead of having a centrally located device controlling all machines, each section of a machine has its own computer that controls the operation. For instance, there may be one machine with a section that controls dry elements of cake frosting and another section controlling the liquid elements, but each section is individually managed by a DCS. A DCS is commonly used in manufacturing equipment and utilizes input and output protocols to control the machine. A DCS typically uses custom designed processors as controllers and uses both proprietary interconnections and standard communications protocol for communication. Input and output modules form component parts of the DCS. The processor receives information from input modules and sends information to output modules. The input modules receive information from input instruments in the process (or field) and the output modules transmit instructions to the output instruments in the field. The inputs and outputs can be either analog signal which is continuously changing or discrete signals which are 2 state either on or off. Computer buses or electrical buses connect the processor and modules through multiplexer or de-multiplexers. Buses also connect the distributed controllers with the central controller and finally to the Human–machine interface (HMI) or control consoles.[/vc_column_text][/vc_column][/vc_row]